

How To Plot N-simple Moving Average Fir Filter In Matlab
The moving average filter is a simple Depression Pass FIR (Finite Impulse Response) filter commonly used for smoothing an array of sampled data/signal. It takes 
As the filter length increases (the parameter
The MA filter performs three important functions:
ane) It takes
two) Due to the computation/calculations involved, the filter introduces a definite amount of delay
3) The filter acts as a Low Laissez passer Filter (with poor frequency domain response and a good time domain response).
Implementation
The difference equation for a 

\[y[n] = \displaystyle{\frac{1}{L} \sum_{k=0}^{L-ane}ten[n-k]} \quad\quad (one) \]
For example, a 
\[\brainstorm{aligned} y[n] &= \displaystyle{\frac{1}{5} \left(ten[n] + ten[n-1] + 10[n-2] + x[n-3] + x[n-4] \right) } \\ &= 0.2 \left(10[north] + x[n-ane] + x[n-2] + 10[n-iii] + x[n-iv] \right) \cease{aligned} \quad\quad (two) \]

The unit delay shown in Effigy 1 is realized past either of the ii options:
Z-Transform and Transfer function
In bespeak processing, delaying a signal ![x[n]](https://s0.wp.com/latex.php?latex=x%5Bn%5D&bg=ffffff&fg=000&s=0&c=20201002)

![X[z]](https://s0.wp.com/latex.php?latex=X%5Bz%5D&bg=ffffff&fg=000&s=0&c=20201002)

\[ \begin{aligned} y[northward] &= 0.2 \left(x[n] + ten[n-1] + 10[n-2] + ten[northward-3] + x[north-4] \right) \\ Y[z] &= 0.two \left(z^0 + z^{-ane} + z^{-2} + z^{-three} + z^{-4} \right) X[z] \\ Y[z] &= 0.2 \left(1 + z^{-1} + z^{-two} + z^{-iii} + z^{-iv} \right) X[z] \quad\quad (three) \end{aligned}\]
Similarly, the Z-transform of the generic
\[x Y(z) = \left(\displaystyle{\frac{1}{L} \sum_{chiliad=0}^{L-1} z^{-1000}} \correct) Ten(z) \quad\quad (4) \]
The transfer function describes the input-output relationship of the arrangement and for the
\[H(z) = \displaystyle{\frac{Y(z)}{X(z)}} =\displaystyle{\frac{1}{L} \sum_{thou=0}^{L-1} z^{-one thousand}} \quad\quad (5)\]
Simulating the filter in Matlab and Python
In Matlab, we tin can employ the filter function or conv (convolution) to implement the moving boilerplate FIR filter.
In general, the Z-transform 



\[H(z) = \displaystyle{\frac{Y(z)}{X(z)}} = \displaystyle{\frac{b_0 + b_1 z^{-1} + b_2 z^{-2} + \cdots + b_n z^{-n}}{a_0 + a_1 z^{-1} + a_2 z^{-2} + \cdots + a_m z^{-m}}} \quad\quad (6) \]
where, 



For implementing equation (6) using the filter function, the Matlab function is called every bit
B = [b_0, b_1, b_2, ..., b_n] %numerator coefficients A = [a_0, a_1, a_2, ..., a_m] %denominator coefficients y = filter(B,A,10) %filter input ten and get result in y
We can note from the difference equation and transfer role of the
\[\begin{aligned} \{b_i\} &= \{1/Fifty, 1/L, …., 1/L\} &,i=0,1,\cdots,50-1 \\ \{a_i\} &= {ane} &,i=0 \terminate{aligned} \quad\quad (7)\]
Therefore, the
B = [0.2, 0.2, 0.two, 0.2, 0.2] %numerator coefficients A = [one] %denominator coefficients y = filter(B,A,x) %filter input ten and get effect in y
The numerator coefficients for the moving average filter tin be conveniently expressed in short notion as shown beneath
L = five B = ones(one,Fifty)/L %numerator coefficients A = [1] %denominator coefficients ten = rand(1,x) %random samples for x y = filter(B,A,x) %filter input ten and get result in y
When using conv function to implement the moving average filter, the following lawmaking tin can be used
L = 5; x = rand(1,10) %random samples for x; y = conv(x,ones(ane,L)/50)
At that place exists a difference between using conv function and filter role for implementing an FIR filter. The conv role gives the result of complete convolution and the length of the result is length(10)+ L -ane . Whereas, the filter function gives the output that is of same length equally that of the input 
In python, the filtering operation can exist performed using the lfilter and convolve functions available in the scipy signal processing package. The equivalent python code is shown below.
import numpy every bit np from scipy import point L=5 #L-indicate filter b = (np.ones(L))/50 #numerator co-effs of filter transfer function a = np.ones(one) #denominator co-effs of filter transfer part 10 = np.random.randn(ten) #10 random samples for 10 y = signal.convolve(x,b) #filter output using convolution y = betoken.lfilter(b,a,x) #filter output using lfilter function
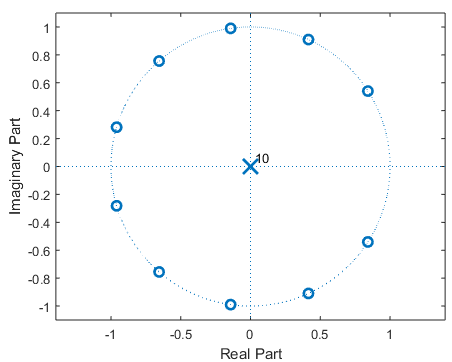
Pole-nada plot and frequency response
A pole-zero plot for a filter transfer role 


In a pole-zero plot, the locations of the poles are usually marked by cross (

In Matlab, the pole-nil plot and the frequency response of the
Fifty=11 zplane([ones(one,Fifty)]/50,1); %pole-zero plot due west = -pi:(pi/100):pi; %to plot frequency response freqz([ones(i,Fifty)]/Fifty,1,w); %plot magnitude and phase response
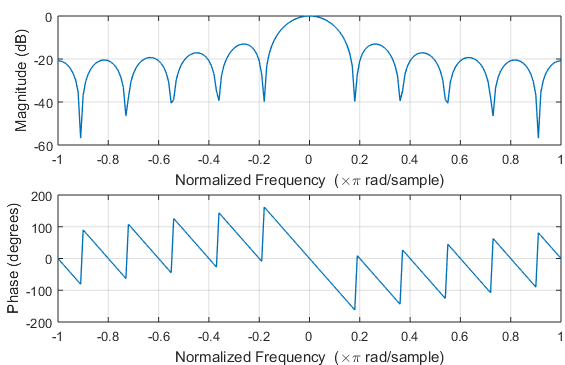
The magnitude and stage frequency responses can be coded in Python equally follows
[updated] See my Google colab for full Python code
import numpy equally np from scipy import point import matplotlib.pyplot as plt L=11 #Fifty-point filter b = (np.ones(L))/50 #numerator co-effs of filter transfer office a = np.ones(1) #denominator co-effs of filter transfer function w, h = bespeak.freqz(b,a) plt.subplot(2, 1, one) plt.plot(w, 20 * np.log10(abs(h))) plt.ylabel('Magnitude [dB]') plt.xlabel('Frequency [rad/sample]') plt.subplot(two, 1, ii) angles = np.unwrap(np.angle(h)) plt.plot(westward, angles) plt.ylabel('Bending (radians)') plt.xlabel('Frequency [rad/sample]') plt.show() 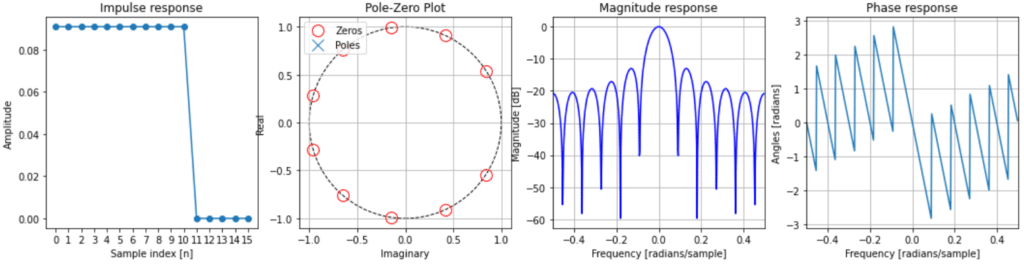
Case report:
Following figures depict the time domain & frequency domain responses of a
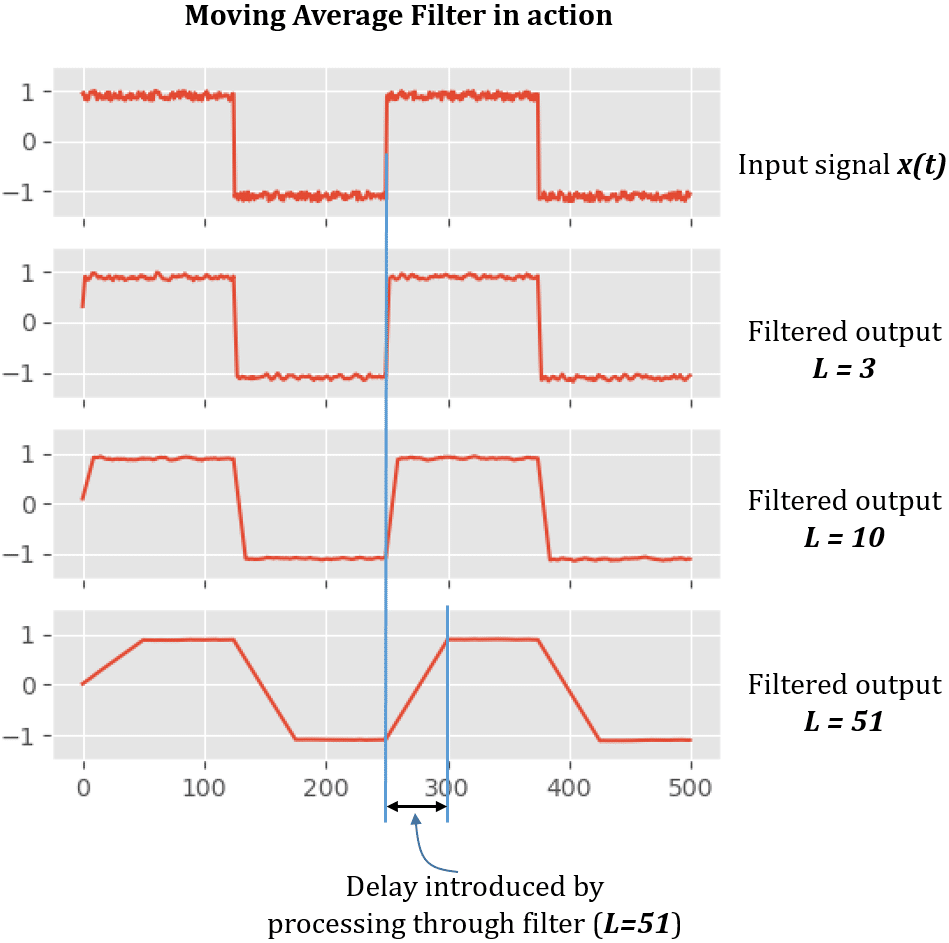
On the first plot, nosotros have the noisy square moving ridge point that is going into the moving average filter. The input is noisy and our objective is to reduce the dissonance equally much every bit possible. The next effigy is the output response of a 3-indicate Moving Average filter. It can be deduced from the figure that the 3-bespeak Moving Average filter has non done much in filtering out the noise. We increment the filter taps to 10-points and we tin can come across that the racket in the output has reduced a lot, which is depicted in next figure.
With L=51 tap filter, though the racket is nigh zero, the transitions are blunted out drastically (detect the gradient on the either side of the point and compare them with the platonic brick wall transitions in the input indicate).
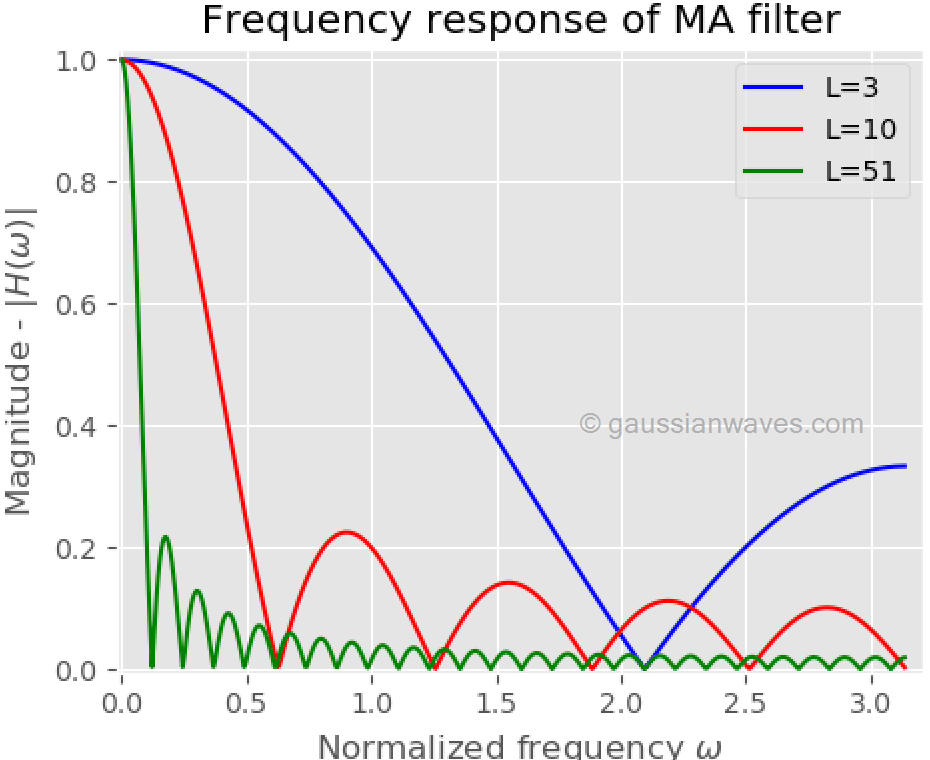
From the frequency response of lower society filters ( L=3, Fifty=10 ), it can exist asserted that the roll-off is very boring and the stop ring attenuation is not practiced. Given this stop band attenuation, clearly, the moving average filter cannot divide one band of frequencies from another. As we increment the filter order to 51, the transitions are not preserved in time domain. Expert performance in the time domain results in poor performance in the frequency domain, and vice versa. Compromise need for optimal filter design.
Rate this article: 
 (46 votes, average: iv.41 out of v)
(46 votes, average: iv.41 out of v)
References:
[1] Filtering – OpenCourseWare – MIT.↗
[ii] HC Chen et al.,"Moving Average Filter with its application to QRS detection",IEEE Computers in Cardiology, 2003.↗
Similar topics
Books by the writer

How To Plot N-simple Moving Average Fir Filter In Matlab,
Source: https://www.gaussianwaves.com/2010/11/moving-average-filter-ma-filter-2/
Posted by: brookscreter1959.blogspot.com
0 Response to "How To Plot N-simple Moving Average Fir Filter In Matlab"
Post a Comment